近期笔者遇到不少来咨询投饲设备,特别是养虾投饲机。饲料是养殖成本中最大的部分,因此精准投喂成了近几年研究的热点,发表的论文和授权的专利非常多。
但奇怪的是,产业中能够非常好应用的投饲机却不多见,究其原因主要是国内养殖品种和养殖模式众多,而投饲和摄食行为密切相关,养殖者对投饲设备的需求不仅要功能多样化,而且还要物美价廉;设备制造商由于单一投饲设备的市场偏小和多功能造成的成本偏高而降低了生产的积极性。所以造成了一方面产业急需投饲设备,而市场上却找不到合适的。
因此,笔者提出目前投饲设备应采用“定制化生产”的方式来满足养殖者和制造商的共同需求,双方切勿以一种类型投饲设备包打天下,而研究人员则要加强针对品种的投饲策略、投饲模型等基础研究,为设备的制造和调控提供数据支撑。
本文归纳了国内外常见的投饲设备及系统,供大家批评指正。
投饲机的类型
(一)根据投料形式,投饲机主要分为离心式投饲机、风送式投饲机、下落式投饲机。
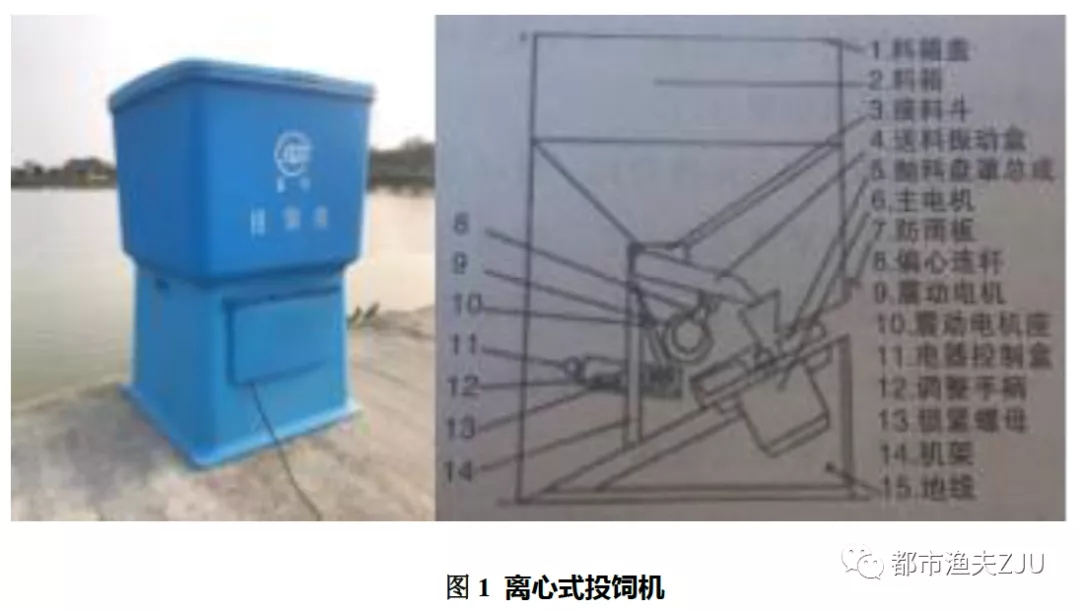
离心式投饲机:由料箱、控制器、抛掷运动的下料机构、抛料电机、抛料盘等部分组成,投料形式为机械离心抛投的投饲机。这是养殖中最常见的一种投饲机,适用于颗粒料,常常用于户外中小型池塘。
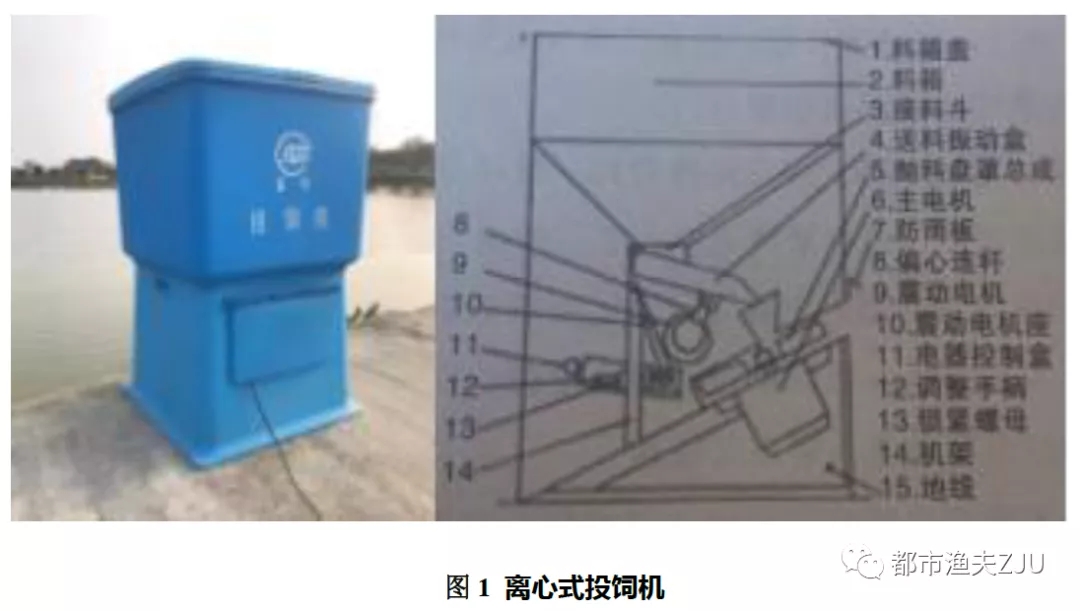
主要特点:
1.采用带盖箱体组成料斗,具有防潮功能;
2.由电机带动偏心轮振动式下料,避免下料管道堵塞;
3.投料形式为机械离心抛投,抛洒面积较大;
4.适用于颗粒饲料,不适用于粉料;
5.占地面积小、机构简单,操作方便,容易维护。
风送式投饲机:由料箱、供料机构、投料机构(空气压缩机或风机、输送管、输送分配装置等)及控制器等部分组成。
投料形式分为两种:一种为仅依靠风力管道喷射的投料方式,常用于循环水养殖跑道养殖模式。另外一种为利用电机带动抛撒盘旋转将饲料吸进抛料盘实现360°抛撒饲料。常用于网箱、水库等大水面养殖环境。
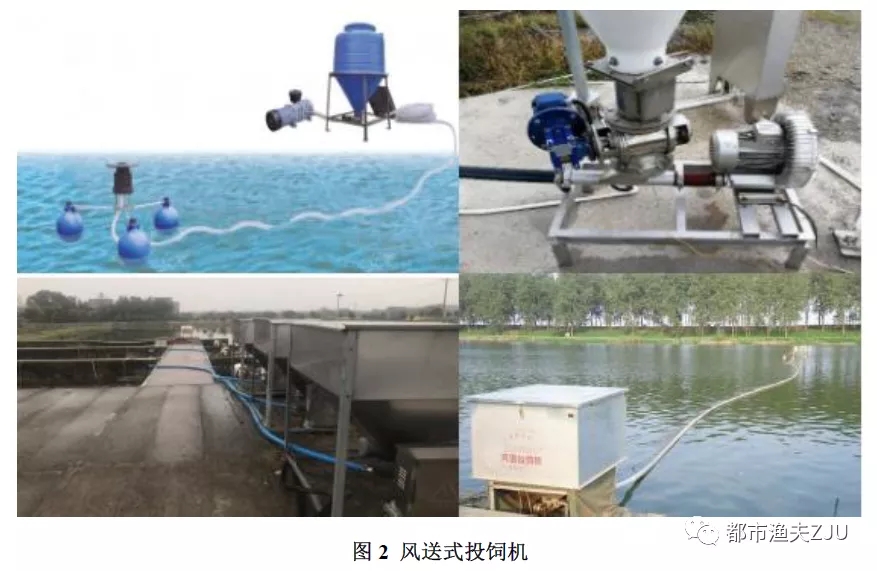
主要特点:
1.料箱大,饲料可存储量大;
2.饲料传输距离远,投料能力强;
3.适用于颗粒饲料;
4.抛洒区域大,可用于大水面养殖。
下落式投饲机:由料箱、供料机构及控制器等部分组成,投料形式为自由下落的投饲机。
供料机构通常有两种:一种为电机带动落料盘转动,饲料离心掉落。另一种为电机驱动螺旋绞龙转动,将料仓内的饲料传输至落料口,落料口设置在螺旋绞龙的末端将饲料排出。下落式投饲机常用于用于鱼苗或投饲量小的工厂化/实验养殖。
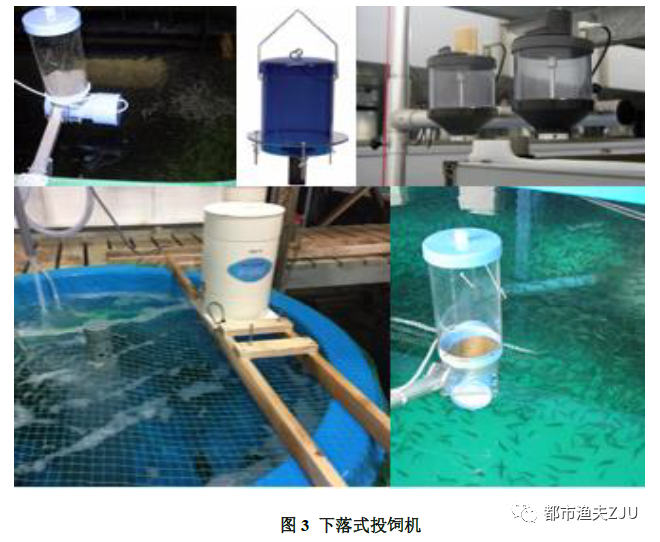
主要特点:
1.体积小,重量轻;
2.适用于粉料等小颗粒饲料;
3.只针对鱼苗等小型养殖池使用;
4.结构简单,价格便宜。
加拿大的Fish Farm Supply Co Inc.公司在下落式投饲机基础上研制出自需式投饲机(如图4),该种投饲机的不需要供电,养殖鱼进入饵料投放区域触发投饲机水下装置开关时,出料口会打开落下饲料,具有结构简单、维护简单、成本低等特点。

但该类型投饲机对鱼的学习能力和训练有要求,并且鱼群中社会等级较高个体会占据投饵机触发和饵料投放区域,并阻止其他个体接近此区域,易造成鱼个体大小差异明显情况;触发传感装置易出现频繁地被鱼群中的个体“无意”触发,从而造成饲料浪费。
(二)根据应用环境,投饲机分为池塘投饲机、网箱投饲机和室内工厂化投饲机。
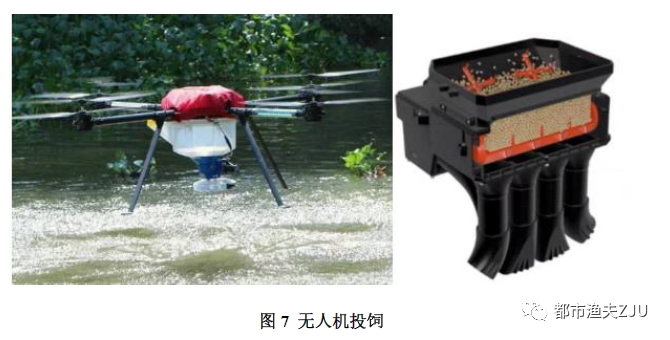
池塘投饲机:由于池塘养殖所用饲料主要为颗粒饲料,根据养殖环境的不同投饲机的使用通常分为两种情况,中小池塘选用离心式投饲机,大水面、水库等选用风送式投饲机。为提高该场景内投饲效率,无人船、无人机等也逐渐被应用其中。


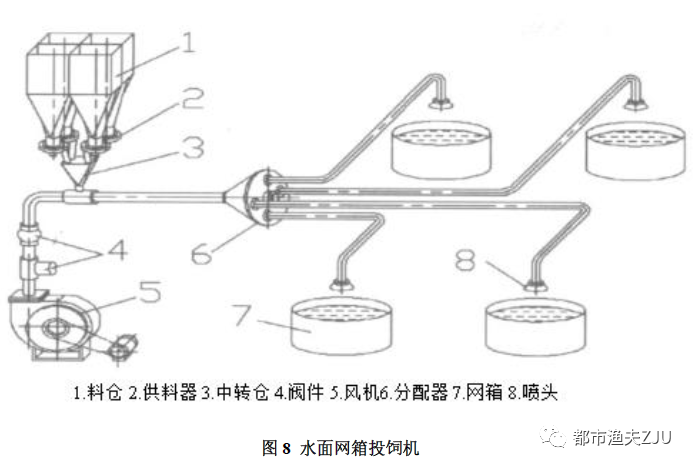
网箱投饲机:网箱投饲机分为水面网箱投饲机(如图8)和深水网箱投饲机(如图9)。
水面网箱投饲机通过风送式投饲机将饲料经分配装置和投喂装置抛洒在网箱的中间区域。水面网箱投饲机常用于小风浪水域网箱使用。深水网箱投饲机需要把饲料直接输送到距离水面几米以下网箱的中央。
通过水泵调节控制投料速度,然后使用分配装置和投喂装置对鱼投喂,灯光与网箱投饲机配合使用情况下投喂效果更佳。深水网箱投饲机常用过海洋、水库等水域养殖。因为国外常食用海鲈鱼、石斑鱼、三文鱼等海产鱼,海水养殖以网箱为主,所以网箱投饲机是国外常见的一种投饲机。
主要特点:
1.以风送式投饲机为基础改装;
2.料箱大,饲料可存储量大;
3.饲料传输距离远,投料能力强;
4.饲料抛洒在网箱网箱的中间区域的水面上。
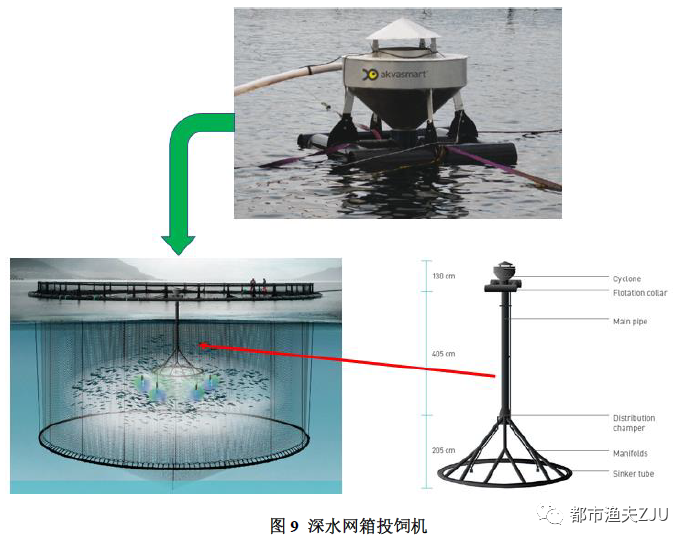
主要特点:
1.风送式投饲机和变频水泵结合工作;
2.投料区域大;
3.通过水泵调节水压,完成深水投饲工作;
4.适用于栖息深水层的鱼类。
室内工厂化投饲机:通常采用由轨道、行走滑车和定位传感器组成的行走系统与下落式/离心式投饲机结合完成投饲工作。一般要求投饲机投料精确且可以联网远距离监控,实现自动化管理。
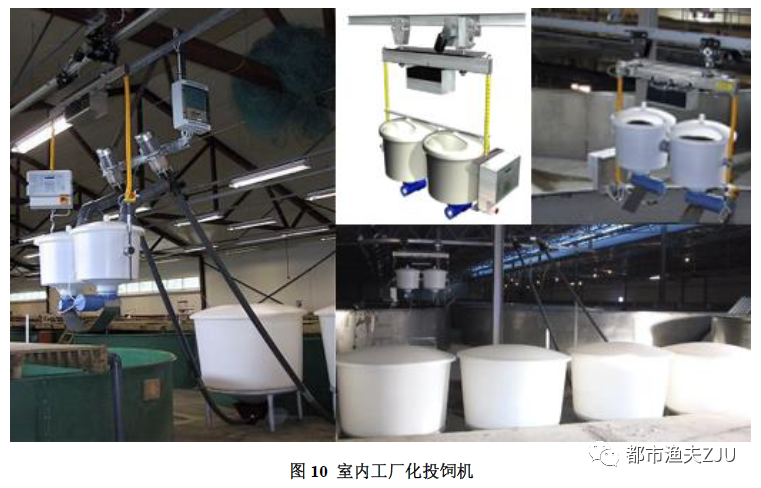
主要特点:
1.具有饲料储存、计量和撒料功能;
2.投料精准;
3.自动化、集成化程度高。
智能精准投饲系统
传统的投饲机只能根据渔民经验设定每次的投喂量,无法感知水质和气象等一系列环境因素的变化来决定是否投喂或者增加减少投喂量,因此不能很好的根据鱼类的生长而实时调整。目前的投饲机大部分只是简单的替代了手动抛洒饲料这一过程。
当前国内外对于精准投喂的研究大部分都是基于养殖对象理论摄食节律定时投喂的,即在固定时间以特定的投喂策略进行投饲,视鱼类饱食情况选择性地停止投喂,属于被动式投喂。该类研究/应用的难点在于如何精准量化养殖对象在投喂过程中的摄食欲望程度。
借助于声学技术和计算机视觉,目前常通过对养殖对象摄食行为、摄食音频以及残饵量的量化分析来实现投喂过程中的鱼类摄食需求,并根据实时摄食需求自动调整饲料投喂时间和投喂量。
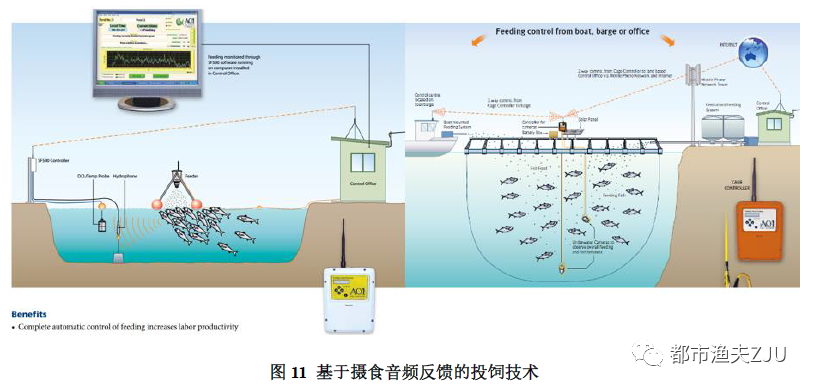
澳大利亚的AQ1系统有限公司设计出摄食音频的投喂系统(如图11)。使用水听器传感器,通过测量“进食”声音来确定鱼类的进食活动。该系统具有自适应的投喂算法来控制投喂速度,并建立了高质量的船用标准。这种易于维护的系统为养殖户提供了灵活和经济有效的投饲控制和环境监测。采用该投喂系统可以结合不同类型的投饲机适应不同的养殖环境。
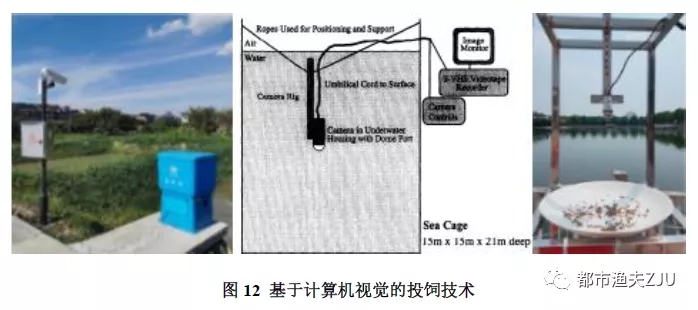
基于计算机视觉的投饲装置产品在市面上并不多见,较多的还处在实验阶段(如图12)。笔者所见的基于计算机视觉的投饲装置工作原理主要有两个方面:
1、使用水下摄像机拍摄网箱底部的残余饵料,当残余饵料数量低于事先设定阈值时,投饲机工作投喂饲料。
2、监测鱼的位置和密度,通过相关手段对鱼群的饥饿程度或摄食欲望进行量化,进而将信号反馈给控制系统控制投饲机的工作状态。
除了上述方法外,投饲过程中的水质参数(如水温、溶解氧)变化也可为鱼类摄食需求评估提供参考。
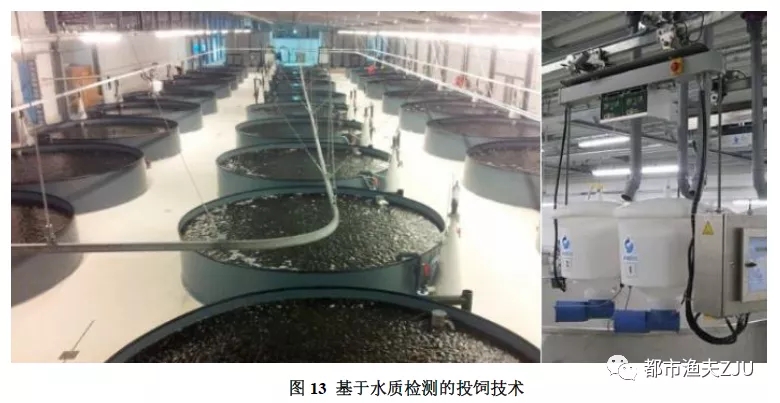
芬兰的Arvo-tec公司设计的机器人投饵系统(如图13)。其特点是投喂量小,但精度高。这套系统由1~4个小型的漏斗形投饵单元—投饵机器人组成,这些投饵单元沿着安装在养殖池上方的轨道在各个养殖池之间移动投饵。
该系统可以对水温和溶解氧浓度进行监测,再将数据反馈到控制系统并自动地对投饵程序做出一定的修正,以满足饲料需求的任何细微变化。并且当投饵机器人到达轨道上的饵料补充点时,大料仓可以自动向机器人上的漏斗型小料仓补充饲料。
团队工作开展情况
通过检索,发现水产养殖投饲相关的授权有效发明专利共有57项(2014年至今),其中企业24项,高校科研院所23项,个人10项。
企业和个人的创新点主要集中于针对不同类型投饲机的结构、定时计量功能,而高校科研院所的创新点主要集中于不同类型投饲机的结构并结合声学、计算机视觉等技术的智能投饲系统。其中笔者所在团队针对智能投饲授权的发明专利数量排名第一。
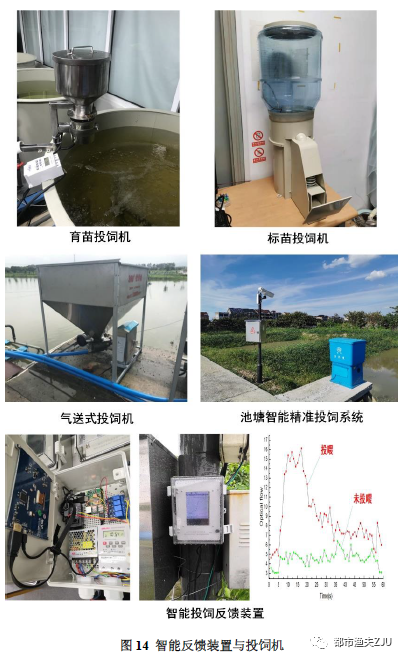
团队利用计算机视觉技术实时获取鱼群摄食状态信息,耦合智能算法,构建了智能精准投喂模型,研发了精准反馈投喂装置样机1套(图14)。针对不同的养殖模式和品种,研制了相应的投饲机械装置,均可与智能反馈装置配套使用,形成智能精准投饲系统,目前正在体系试验基地进行测试,不断迭代优化。
进一步的,在投饲前沿研究方面,为保证养殖鱼类的摄食福利,在被动式投喂基础上创新提出了基于鱼群自发时空行为智能感知的主动式投喂理念;并借助于深度学习技术和博弈理论实现了工业化养殖环境下的鱼群全局、局部突发行为的高精度监测,以及鱼群个体身份的高精度识别,解决了主动式投喂过程中的关键技术难题,并在实际养殖中进一步验证。
参考文献
[1]赵建,叶章颖*.循环水养殖游泳型鱼类摄食活动强度评估方法研究[J].农业机械学报,2016,47(8):288-293.
[2]赵建.循环水养殖游泳型鱼类精准投喂研究[D].浙江大学,2018.
注:相关产品照片及性能参数选自各公司官网.