2021年,全国淡水养殖面积为4 983.87千hm2,池塘养殖规模达2 604.63千hm2,占总面积的52.26%[]。池塘养殖设施装备主要是指在池塘养殖生产中,为提高养殖效率、改善养殖环境、提高节能减排水平所使用的各类专业化的设施和装备工程[]。“十三五”以来,我国水产养殖机械化水平不到30%,其中池塘养殖机械化水平为32.08%[]。根据农业农村部印发的《关于加快水产养殖机械化发展的意见》[],到2025年,水产养殖机械化水平总体须达到50%以上。
虾蟹养殖是池塘养殖的重要组成部分,由于领地性特点和游泳能力限制,虾蟹池塘机械化实现较鱼塘有更多的困难。虾蟹养殖主要包括投饲、增氧、水质监测与调控、水草收割、水下监控和物联网系统等环节,机械化装备主要包括投饲装备、增氧装备、水草收割装备、多功能组合作业装备和水质监控装备等。虾蟹养殖机械化装备是智能养殖和精益养殖的基础,对养殖生态效益和社会效益影响较大。当前,除增氧等少部分环节装备相对成熟外,投饲、割草、捕捞等环节机械化装备距离普及应用还有较大差距,亟需推进相关研究,通过相关装备的集成化、标准化,提升使用可靠性和机械化生产水平。本文通过梳理虾蟹池塘养殖机械化的现状,分析虾蟹池塘养殖机械化存在的问题,总结养殖机械化的发展趋势,探讨虾蟹养殖机械化的途径,提高养殖现代化的水平和养殖效益。
1 虾蟹池塘养殖机械化发展现状
虾蟹游泳能力弱,养殖生产过程要求设备“动”而虾蟹相对“不动”,给机械化带来很多新的挑战。目前,虾蟹池塘养殖机械化设备主要有投饵装置、水草收割装置、多功能组合作业装备和养殖监控系统等。
1.1 投饵装置
虾蟹养殖池塘投饵与鱼塘不同,由于要求均匀遍洒,鱼塘中固定式投饵装置难以直接应用,区域性投饵过量和不均匀会造成饵料浪费和水体污染。养殖一线对于机械化投饵有强烈需求,特别是在生产人员年龄普遍偏高的现状下,出现了投饲员背负投饵机进行投喂,将小型投饵机固定在船体上,根据需要划船开机进行投喂,也有采用人工驾驶电动三轮车行走在硬质塘埂上进行投喂。这些投饵方式优点是可降低劳动强度,但饲料抛撒不够均匀,容易形成重复抛和漏抛,饵料利用率较低。PREM等[]开发了一种简单的人力投饲机,类似于水上自行车的一个投喂装置,可以在较低成本下在淡水水产养殖池塘投饲,适用于发展中国家淡水养殖的人力投喂现状。
随着无人机技术逐渐成熟,成本稳步降低,采用无人机投饵成为可能。对于投饵量相对较低的应用场景,考虑到无人机负载和投饵量需求的匹配性,已有投喂型无人机在水产养殖中进行示范性应用。在投喂控制策略方面,林明等[]设计了一种无人机自动投饵装置控制方法及系统,无人机自动投饵装置的拍摄模块可以拍摄该虾塘的图片信息,电脑根据图片信息构建虾塘的三维地图,无人机自动投饵装置利用定位模块得到位置信息和坐标信息,电脑根据三维地图、定位信息和坐标信息及用户设定投饵要求得到反馈,并传输给用户虾塘料仓设有的用户终端。用户终端向工控电脑发送任务规划信息,电脑向无人机主控模块发送指令,无人机飞行器装置起飞,在主控的控制下对池塘进行投饵操作。沈启扬等[]设计了养殖技术领域的一种水产养殖用无人机投饵装置,装置通过自动补料,全过程无需人工,自动进行补仓,能够提高投喂效率。
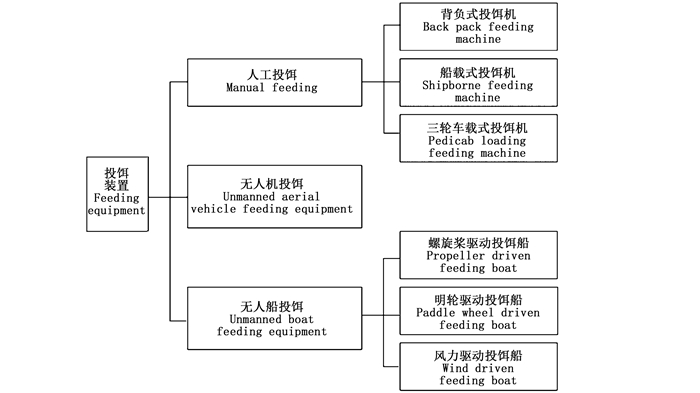
无人自主导航投饵船成本低,载饵量大,是解决虾蟹塘投饵的可行方案之一。国内外研究人员针对下料方式、驱动方式、河蟹智能识别、精确投饵算法和行走控制算法方面均有研究[-]。针对无人船直接搭载传统投饵机破碎率高、下料过程中船体重心偏移大影响螺旋桨吃水深度等问题,胡庆松等[]开发了振动式投饵装置,降低了破碎率和重心。孙月平等[]提出了一种空气螺旋桨风力驱动船载自动投饵系统及均匀投饵方法,装备由空气螺旋桨风力驱动船、自动投饵装置、GPS导航等组成,包括提供风速、风向、温度、湿度、气压信息的气象检测模块,利用卫星导航系统[-]实现路径跟踪,路径规划采用梳状往复遍历方式以保证投饵全覆盖。考虑到虾蟹池塘水草分布的实际,采用明轮驱动也是较为常用的一个方案。根据投饵方式、自动化程度和驱动方式的不同,常见的投饵装置分类如所示。
图 1(Fig. 1)
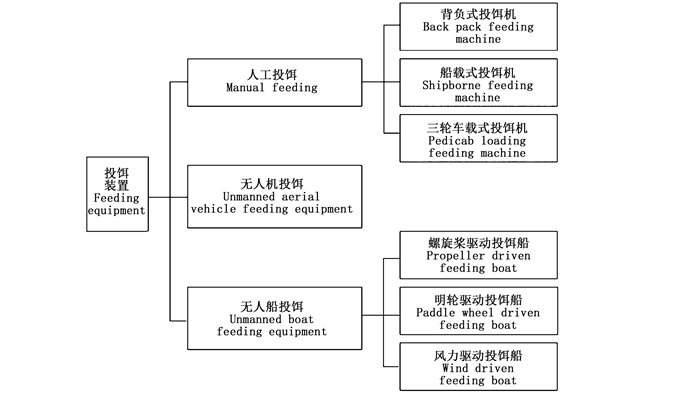
图 1 投饵装置的分类Fig. 1 Classification of feeding equipment
1.2 水草收割装置
水草为池塘河蟹等养殖对象提供栖息活动场所,可以作为优质青饲料,能显著改良水质,可以提高水体溶氧量,有效净化水质,防止水质过肥和富营养化,可以稳定pH,使水质保持中性偏碱,增加水体的透明度,降低有害无机物含量。水草密度过高,会造成水草底层根茎断裂而漂浮,失去净化能力,后期腐烂会进一步恶化水质。此外过多过密的水草会使河蟹栖息与蜕壳空间压缩,所以需要定期对水草进行收割和管理。人工收割水草作业效率低、劳动强度大,作业质量不一,易受天气影响,机械化收割水草对河蟹养殖具有重要意义[]。
常用的机械割草设备有分开式切割机、割收一体机以及疏草机[]。分开式切割机大部分产品采用往复式切割器,切割器主要构造包括两把刀片,作业时至少一把刀片往复运动,与另一刀片形成相对的切割。此类产品一般只割不收,所以可安装遥控装置进行操作。割收一体机的切割器安装在船体前端,切割器将水草割断后,船体前端(或腰部)的水草收集装置将割断的水草收集起来,集中处理。割收一体机的优势是在割断水草的同时,将水草收集起来进行脱水打包处理,工作效率高,且不会造成二次污染。疏草机的原理是利用输送带上的倒钩勾住水草,将水草连根拔起,输送至船体,防止水草过密导致虾蟹行走不畅等问题。该种机械外形与割收一体机相似,只是取消了割刀,在输送带上安装了倒钩。由于没有割刀,减少了收割过程中对虾蟹的伤害。
全自动化水草收割近年来也进行了一些探索,吴波等[]设计并制造了一种基于进阶精简指令集机器(advanced RISC machine, ARM), 利用全球定位系统(global positioning system, GPS)与信息网络系统(information network system, INS)联合自主导航的河蟹养殖水草清理作业船,集手动控制、遥控和自动控制于一体。日本KAIZU等[]开发出一款低成本的无人水草收割船,该船搭载差分全球卫星导航系统(real time kinematic-global navigation satellite system,RTK-GNSS),并使用电池作为能源,尺寸较小,重量轻,能耗低。该船使用一种特殊结构的推进器,可以防止水草纠缠并实现长期自动导航。在收割荷花时割草横向偏差为9.4 cm,平均速度为0.41 m/s,平均功率518 W。水草收割装置按照收割方式和自动化程度的不同,常见的水草收割装置的分类如所示。
图 2(Fig. 2)
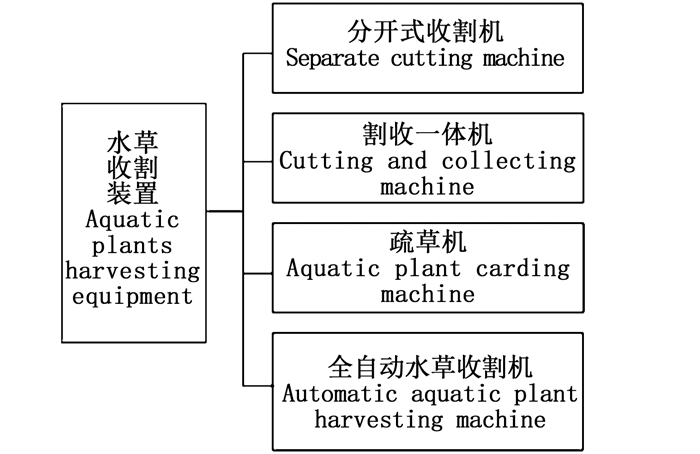
图 2 水草收割装置的分类Fig. 2 Classification of aquatic plants harvesting equipment
1.3 多功能组合作业装备
虾蟹养殖作业环节较多,各个养殖环节所需的船体行走需求基本相同,单环节作业装备船体利用率低,将多种作业装备搭载在同一船体上进行复合作业是重要发展趋势,可以减少单个池塘中设备总数量,降低作业装备总成本和维护费用,提高池塘养殖现场的可推广性。
赵德安等[]针对河蟹养殖过程中存在的水草清理难度大、喂料投饵不均匀、人力成本高等问题,设计了一种基于ARM和GPS/INS组合导航的多功能全自动河蟹养殖作业船导航控制系统。该系统集水草自动清理和均匀投饵于一体,所有装置均由一个容量为120 Ah的48 V锂电池驱动,设计有监控终端上位机软件,可接收河蟹养殖作业船的当前位置、当前航速、吃水深度等信息并在监控终端上显示;保存河蟹养殖作业船运行过程中的状态信息,可以发出命令以启动或停止河蟹养殖作业船的运行。姜宽舒等[]设计了一种基于Mission planner开源地面站和GNSS结合的多功能自主导航水产养殖作业船。作业船有手动和自动导航两种控制模式,可以实现巡线、增氧、投饵、施药、水质监测等功能,并将船体的工作模式、速度、航向、轨迹、剩余电量等信息上传至地面测控软件。
1.4 养殖监控系统
良好的水质环境是健康养殖的基础,药品不当使用、饵料残留和生物排泄物等会导致水质的恶化与环境的破坏。随着对水产品品质和养殖尾水的重视,养殖监控变得越来越重要。养殖监控主要包括水质监测、视频监控和设备远程控制等。养殖监控分为实验室检测、自动在线监测和一体化监控3种()。监控系统依据水质监测数据融合形成控制指令控制增氧机等水质调控设备,辅以生物化学方法调节养殖水体环境,视频监控主要分为水下和水上监控两部分,观察养殖对象和养殖现场情况。
图 3(Fig. 3)
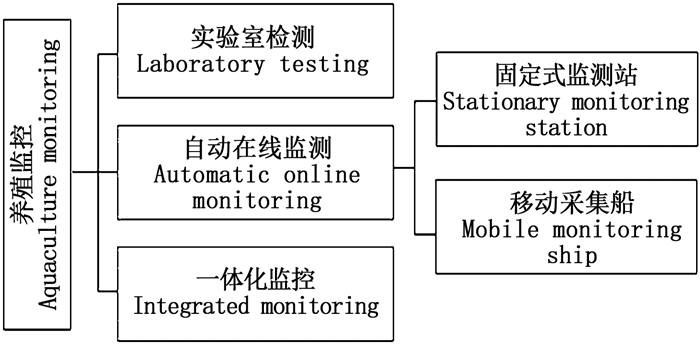
图 3 养殖监控系统的分类Fig. 3 Classification of aquaculture monitoring
范振[]为了低成本快速获取总氮总磷含量,设计了基于随机森林和GBDT算法的快速预测模型无线采集器获得水质参数信息并参与作为组网传输的单元。陈雷雷等[]为研究微流水循环生态养蟹模式下河蟹养殖池塘的水温分布特性,设计了基于物联网云的多层水温实时监测系统,采用太阳能电池进行能源补充,结果显示系统能实时、稳定地监测池塘各水层的水温,既绿色环保又避免了池塘中拉设电线带来的风险。JAMROEN等[]提出了基于水产养殖的窄带物联网(NB-Iot)的独立光伏(PV)/电池能量存储(BES)水质监测系统,使用Arduino Mega 2560芯片主控板。HUAN等[]为了监测养殖池塘水质,设计和实现了基于NB-Iot的水产养殖池塘水质监测系统,该系统使用STM32L151C8芯片和传感器技术来收集水生环境信息。刘雨青等[]以嵌入式与PLC相结合作为控制核心,采用WiFi组网方式将各个子系统连接,实现了对水质(溶解氧、pH、水温等)、气象(温度、湿度、风向、风速、气压、雨量、光照等)、视频数据的监测,以及对增氧机与投饲机设备的控制。
2 虾蟹池塘养殖机械化存在的问题
虾蟹池塘养殖机械化率不高的根本原因是其本身存在更大的难度,设备的移动式工作导致需要信息化的加持才能实现。目前信息化技术在水产养殖中应用还存在稳定性较差,成本较高等问题,导致虾蟹池塘养殖机械化率还较低。除增氧等少数环节外,虾蟹池塘装备在成熟度、适应养殖现场环境等方面存在很多不足。
2.1 机械装备成熟度不高
增氧系统在虾蟹池塘养殖已经普及,其能够广泛应用的基础是工作模式简单且可靠性高,与之相比投饵、捕捞等环节现有装备还有较大差距。目前所研发的虾蟹池塘养殖投饵、割草等装备零部件数量是增氧机等传统设备的数倍以上,且机械运动动作数量多,并与电气、通讯等相关联,复杂程度显著上升,导致其熟化还未完成。以割草设备为例,戚浩[]设计了一套割草船控制系统,可通过远程上位机/APP操作割草船在池塘进行全覆盖自巡航割草作业。该系统以STM32F407作为核心处理芯片,将陀螺仪姿态、加速度计和磁力计姿态作为卡尔曼滤波器的预测更新值和观测值,融合输出较为精确的角度值。使用差分GPS导航定位系统实现精确定位,在上位机进行全覆盖路径规划后,通过4G通信网络将路径下载至主控板,采用模糊PID航向/航速控制算法实现控制。作业期间,电量、坐标等数据通过网络回传上位机,电量不足时进行预警返航提醒。采用明轮驱动方式,并在两侧添加圆形薄板,一方面防止水草缠绕,另一方面可以利用水流将水草引入切割装置,便于收割,同时搭配有刷直流电机控制割草船的前进与转弯;水草传输装置利用侧面链条传动机构进行水草收集。
2.2 部分生产环节缺少机械化研究
虾蟹池塘养殖中捕捞等生产环节机械化装备发展严重滞后,进一步导致称重、计数、装运等环节仍然以人工为主,已经成为整体机械化率提升的短板。虽然地笼捕捞对虾相对比较省力,但是罗氏沼虾和河虾还不能用地笼捕捞,需要底拖网捕捞,捕捞耗时且费力。地笼内虾蟹相互挤压,临时性超高密度会引起缺氧,导致销售环节活力不足,显著影响销售效益等问题。在室外池塘养殖密度较低的情况下,直接进行地笼网机械化存在较大困难。虽然进行捕捞机械化存在很大难度,但随着越来越多池塘的大棚化改造,借助转型机会布局新的机械化基础设施有望解决这一问题。此外,虾蟹池塘养殖中除干燥人工颗粒料外,还会使用湿料、南瓜等块状饵料,这些特殊形态饵料的投放对投饵装置在搅拌、抛洒等方面有特殊需求。
2.3 设备适应复杂环境能力不足
虾蟹在水体中的分布性导致相关装备需要具有移动性特点,且这种移动存在塘内移动和塘间移动两种。塘内移动主要面对水草、增氧管等的存在导致螺旋桨动力系统容易被缠绕,即使明轮也无法在水草密度大的情况下实现前进,空气推进效率低。单个装备成本相对较高,单个池塘往往无法承受,需要进行移塘。生产池塘的情况各不相同,一般并无码头、牵引设备等相关辅助设施,导致移塘困难,没有达到节约劳动力的目标。此外,虾蟹养殖池塘会有大风和大雨,移动式投饵、割草等装备的抗风和抗雨防潮能力存在不足[]。
2.4 机械设备的反馈工作模式稳定性不强
池塘实时监测数据的反馈对于高水平机械化运行很重要,以投饵为例,需要根据虾蟹进食行为进行精准投喂以减少环境压力并提高饵料利用率。贺帆等[]根据水体对长波(红光)最先吸收的原理,采用改进网络结构的河蟹识别模型,观察河蟹的分布,变量投饲装置可有效实现饲料分布密度和范围可控的投饲、料仓剩余饲料可测的功能。赵德安等[]公开了一种河蟹养殖投饵量的精准确定方法,由自动导航船搭载水下摄像系统和导航系统,形成池塘全域各网格河蟹密度分布图,根据各网格的面积,确定投放饵料量。赵儒亚[]设计了包括远程监控服务器系统、手机客户端以及水产养殖船船载终端三部分的水产养殖远程监控服务系统。刘勇[]设计了基于云平台的无人投饵船远程监控系统。这些工作对于精准化投饵和系统管控等进行了很好的探索,但由于实际养殖环境下其反馈精准度和稳定性存在较大不确定,导致反馈工作模式存在挑战,还需要在推广应用中不断提升适应实际养殖环境的能力。
3 虾蟹池塘养殖机械化发展趋势
在基础技术环节已获得突破和国家引导性政策下,虾蟹养殖机械化率已进入快速提升时期。在发展过程中,机械化须紧密与养殖模式相融合,通过提升机械装备的标准化和可靠性,与一线养殖的现实状况相适应,在各技术环节获得突破的基础上为无人化虾蟹池塘养殖目标实现提供支撑。
3.1 机械化与养殖模式互相融合
随着对池塘物质能量循环研究的不断深入,虾蟹养殖模式得到持续改进, 尤其是绿色生态养殖逐渐深入[],新的装备需求不断产生,在低密度养殖下各项水质参数的要求有新的变化,传统机械装备与新养殖模式需要磨合。捕捞等环节在传统养殖模式下难以实现机械化,随着越来越多露天池塘养殖向大棚池塘养殖的转化,机械化捕捞等逐渐变的可行,采用轨道等方式进行动力和路径引导在成本上逐渐可以接受,并与投饵、巡池等技术环节装备相融合。河蟹池塘水草品种及种植模式也处于变化之中,采用定植,将水草管理和投饵相结合变得可能。考虑到设备移塘需求,标准化养殖池塘建设提出新要求,在道路、码头、太阳能充电等配置方面需要标准化。
3.2 机械化与养殖人员互相适配
由于水产养殖行业在薪资、工作地点等的局限性,当前一线养殖人员存在年龄偏大,对机械化装备接受意愿偏弱等实际问题。同时,新研发虾蟹池塘养殖设备客观上存在初期故障率较高,与原有养殖模式需进行磨合等现实问题,新装备和养殖人员的相向而行十分重要。在规模化示范性养殖场进行组织模式创新,特别是人员配备方面,专门设立装备维护工种,增加对青年人才的吸引力;在集中连片养殖区域建立养殖装备维护服务专业化公司,实现专人做专事。
3.3 提升机械装备标准化水平和可靠性
虾蟹养殖对设备可靠性要求较高,室外水环境高温、高湿、强紫外线等客观存在,要求设备在材料、结构、润滑等方面需满足严酷的要求,并努力实现寿命的可预期性;逐步引入问题比例指数,倒逼企业不仅仅降低成本,而是努力做到性能和价格的平衡;充分发挥行业学会作用,推进标准化接口的适时介入,在此基础上进行控制定位系统的集成,屏蔽各企业在控制芯片型号选择、通讯协议等的不同带来的使用难度,降低分离器件的数量,同时给予渔机企业在标准化体系内充分发展和竞争的空间。对传统设备的改造提升也很重要,例如太阳能直驱增氧设备已经在可行性方面获得突破,但需要进行电机、变速器等基本机械装备的再研究、再创新,实现新的标准化,以达到同样的可靠性水平。
3.4 加快无人虾蟹示范养殖场建设
无人养殖场是指在没有任何人进入渔场的情况下,由设施、装备、机械、机器人完成从巡检、增氧、投饵、日常管理直至收获的作业模式[-]。由于农业行业特点,单位面积资本密度低,成本承受能力弱,长期以来水产养殖在信息化、智能化方面处于各行业方阵后部位置,尚无法实现“黑灯工厂”。充分利用大工业所形成的低成本信息化基础能力,匹配水产养殖环节的标准化方案,开发控制中间件进行传统装备标准化操控,加快设备熟化,缩短与大工业智能化运行水平的差距;在相关技术环节逐步突破的基础上,推动无人示范养殖场建设,打造高机械化率养殖标杆,建立制度保障体系,引领虾蟹池塘养殖机械化水平不断提升。
4 总结
随着科技的发展,人们对养殖品质要求的提高,以及对环境的日益重视,虾蟹池塘养殖逐渐从粗放式养殖过渡到精细化养殖。养殖模式的变化促进了池塘养殖机械的发展,养殖机械的集成化、系统化和智能化成为养殖机械发展的必然趋势。当前虾蟹池塘养殖在增氧等少部分环节发展较为成熟,投饲、割草和捕捞环节虽有一些研究,但离产品化和实用化还有一定的差距,多环节集成的作业装备还很少,信息精确检测与反馈以及数据深度融合还远远不够。在农机补贴等政策的支持下,虾蟹池塘养殖“机器换人”的步伐将进一步加快。未来,养殖模式与系统化智能设备的深度适配,是构建无人养殖示范场的必备基础,也是提高虾蟹养殖品质和养殖收益的有效途径之一,将加快池塘养殖的现代化进程。