1.本实用新型属于农业机器人技术领域,尤其涉及一种农业自动播种机器人。
背景技术:
2.农业种植根据劳作方式主要分为人工播种和机械播种两类,人工播种适用于小面积、工作量少、机械无法下地的情况,机械播种适用于大面积土地播种作业,效率比较高。在田地播种作业中,常出现机械无法下地、人工劳作效率又太低的问题,因此,急需要适用于上述情况的小型化自动播种设备。基于此,本实用新型设计了一种农业自动播种机器人,实现自动化、智能化农业播种作业,提高农业种植效率,体积小型化,适于规模化推广。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种农业自动播种机器人,实现自动化、智能化农业播种作业,提高农业种植效率,适于规模化推广。
4.技术方案:为实现上述目的,本实用新型的一种农业自动播种机器人,包括智能小车和自动播种箱系统,所述自动播种箱系统安装于智能小车的车架上;所述自动播种箱系统包括种子箱和设置于种子箱正下方的环形堵料板,所述种子箱的箱底板为与箱体摩擦接触的盛料板,所述种子箱的箱体固定设置,所述环形堵料板固定设置并与盛料板之间保持微小间隙;所述盛料板上开设有一圈周向阵列的盛料孔,所述环形堵料板上开设有处于盛料孔周向阵列轨迹上的一个漏料孔,所述漏料孔对接有位于环形堵料板底部的伸缩导料通道,所述盛料板配套设置有驱动其旋转的电机。
5.进一步地,所述盛料板上设置有若干凸起,所述凸起靠近盛料孔均匀分布。
6.进一步地,所述盛料板的中心位置设置有锥形体。
7.进一步地,所述漏料孔的孔径大于盛料孔的孔径。
8.进一步地,所述环形堵料板上设置有沿盛料孔的周向阵列轨迹进行铺设的保护滑层,所述保护滑层对应漏料孔的位置具有缺口。
9.进一步地,所述种子箱的顶部具有箱盖,侧面具有竖向的观察窗。
10.进一步地,所述智能小车的侧面设置有至少四颗摄像头构成的全景影像系统;所述环形堵料板的底部设置有摄像机,智能小车的车架上开设有竖向贯穿的通口,所述伸缩导料通道及摄像机均向下伸入通口内。
11.进一步地,所述伸缩导料通道包括与漏料孔对接的伸缩管以及安装在环形堵料板底部并与伸缩管连接的电动推杆;所述伸缩管的出料口设置有钢圈,所述钢圈上设置有与电动推杆的推拉端连接的延伸连接部。
12.进一步地,所述种子箱通过其侧面的箱连接部安装在智能小车的车架上;所述环形堵料板通过其底部的板连接部安装在智能小车的车架上;所述电机通过电机连接部安装在板连接部上。
13.有益效果:本实用新型的一种农业自动播种机器人,有益效果为:电机驱动盛料孔
旋转,当盛有种子的盛料孔对准漏料孔时,种子通过漏料孔进入伸缩导料通道的内部,进而掉落在田地上,本实用新型的农业自动播种机器人体积小,适用于田垄等间距农业种植播种作业,播种均匀、可靠,效率高,节省劳动力。
附图说明
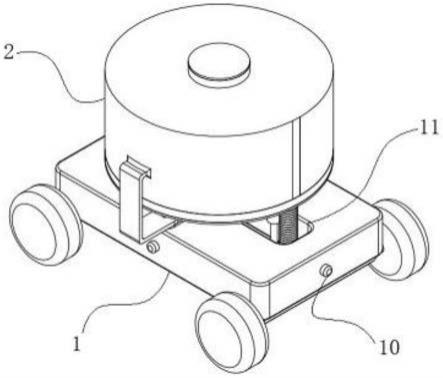
14.附图1为本实用新型的整体结构示意图;
15.附图2为自动播种箱系统的整体结构示意图;
16.附图3为自动播种箱系统的结构分解示意图。
具体实施方式
17.下面结合附图对本实用新型作更进一步的说明。
18.如附图1、附图2以及附图3所示,一种农业自动播种机器人,包括智能小车1和自动播种箱系统2,所述自动播种箱系统2安装于智能小车1的车架上;所述自动播种箱系统2包括种子箱21和设置于种子箱21正下方的环形堵料板23,所述种子箱21的箱底板为与箱体摩擦接触的盛料板22,所述种子箱21的箱体固定设置,所述环形堵料板23固定设置并与盛料板22之间保持微小间隙;所述盛料板22上开设有一圈周向阵列的盛料孔220,所述环形堵料板23上开设有处于盛料孔220周向阵列轨迹上的一个漏料孔230,所述漏料孔230对接有位于环形堵料板23底部的伸缩导料通道26,所述盛料板22配套设置有驱动其旋转的电机24。电机24驱动盛料孔220旋转,当盛有种子的盛料孔220对准漏料孔230时,种子通过漏料孔230进入伸缩导料通道26的内部,进而掉落在田地上,本实用新型的农业自动播种机器人体积小,适用于田垄等间距农业种植播种作业,播种均匀、可靠,效率高,节省劳动力。
19.值得注意的是,所述盛料板22上设置有若干凸起221,所述凸起221靠近盛料孔 220均匀分布。通过凸起221的设置,能够对箱底部且靠近盛料孔220区域的种子进行搅动,能够促进种子进入盛料孔220内。
20.更为具体的,为了减少箱体内的种子剩余量,所述盛料板22的中心位置设置有锥形体222。
21.在盛料板22旋转过程中,盛料孔220内的种子与环形堵料板23直接接触情况下会发生滚动磨损,容易造成种子破损,为了解决这种问题,所述环形堵料板23上设置有沿盛料孔220的周向阵列轨迹进行铺设的保护滑层28,所述保护滑层28对应漏料孔230 的位置具有缺口281,从而让种子直接与保护滑层28接触,避免种子被磨损损坏。保护滑层28可选用表面光滑的物质铺设,比如塑料薄膜。
22.所述种子箱21的顶部具有箱盖,侧面具有竖向的观察窗27,便于观察种子余量。
23.所述智能小车1的侧面设置有至少四颗摄像头10构成的全景影像系统;所述环形堵料板23的底部设置有摄像机25,智能小车1的车架上开设有竖向贯穿的通口11,所述伸缩导料通道26及摄像机25均向下伸入通口11内。
24.所述伸缩导料通道26包括与漏料孔230对接的伸缩管261以及安装在环形堵料板 23底部并与伸缩管261连接的电动推杆262;所述伸缩管261的出料口设置有钢圈263,所述钢圈263上设置有与电动推杆262的推拉端连接的延伸连接部264。通过伸缩管261 对种子的掉落进行导向,能够避免种子掉落轨迹歪斜、掉落地面弹起等问题。
25.所述种子箱21通过其侧面的箱连接部21.1安装在智能小车1的车架上;所述环形堵料板23通过其底部的板连接部23.1安装在智能小车1的车架上;所述电机24通过电机连接部24.1安装在板连接部24.1上。
26.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种农业自动播种机器人,其特征在于:包括智能小车(1)和自动播种箱系统(2),所述自动播种箱系统(2)安装于智能小车(1)的车架上;所述自动播种箱系统(2)包括种子箱(21)和设置于种子箱(21)正下方的环形堵料板(23),所述种子箱(21)的箱底板为与箱体摩擦接触的盛料板(22),所述种子箱(21)的箱体固定设置,所述环形堵料板(23)固定设置并与盛料板(22)之间保持微小间隙;所述盛料板(22)上开设有一圈周向阵列的盛料孔(220),所述环形堵料板(23)上开设有处于盛料孔(220)周向阵列轨迹上的一个漏料孔(230),所述漏料孔(230)对接有位于环形堵料板(23)底部的伸缩导料通道(26),所述盛料板(22)配套设置有驱动其旋转的电机(24)。2.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述盛料板(22)上设置有若干凸起(221),所述凸起(221)靠近盛料孔(220)均匀分布。3.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述盛料板(22)的中心位置设置有锥形体(222)。4.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述漏料孔(230)的孔径大于盛料孔(220)的孔径。
5.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述环形堵料板(23)上设置有沿盛料孔(220)的周向阵列轨迹进行铺设的保护滑层(28),所述保护滑层(28)对应漏料孔(230)的位置具有缺口(281)。6.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述种子箱(21)的顶部具有箱盖,侧面具有竖向的观察窗(27)。7.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述智能小车(1)的侧面设置有至少四颗摄像头(10)构成的全景影像系统;所述环形堵料板(23)的底部设置有摄像机(25),智能小车(1)的车架上开设有竖向贯穿的通口(11),所述伸缩导料通道(26)及摄像机(25)均向下伸入通口(11)内。8.根据权利要求1或7所述的一种农业自动播种机器人,其特征在于:所述伸缩导料通道(26)包括与漏料孔(230)对接的伸缩管(261)以及安装在环形堵料板(23)底部并与伸缩管(261)连接的电动推杆(262);所述伸缩管(261)的出料口设置有钢圈(263),所述钢圈(263)上设置有与电动推杆(262)的推拉端连接的延伸连接部(264)。9.根据权利要求1所述的一种农业自动播种机器人,其特征在于:所述种子箱(21)通过其侧面的箱连接部(21.1)安装在智能小车(1)的车架上;所述环形堵料板(23)通过其底部的板连接部(23.1)安装在智能小车(1)的车架上;所述电机(24)通过电机连接部(24.1)安装在板连接部(24.1)上。
技术总结
本实用新型公开了一种农业自动播种机器人,包括智能小车和自动播种箱系统,自动播种箱系统安装于智能小车的车架上;自动播种箱系统包括种子箱和设置于种子箱正下方的环形堵料板,种子箱的箱底板为与箱体摩擦接触的盛料板,种子箱的箱体固定设置,环形堵料板固定设置并与盛料板之间保持微小间隙;盛料板上开设有一圈周向阵列的盛料孔,环形堵料板上开设有处于盛料孔周向阵列轨迹上的一个漏料孔,漏料孔对接有位于环形堵料板底部的伸缩导料通道,盛料板配套设置有驱动其旋转的电机。本实用新型提供的一种农业自动播种机器人,实现自动化、智能化农业播种作业,提高农业种植效率,适于规模化推广。于规模化推广。于规模化推广。
技术研发人员:史志军 张云辉 郭双双 张召召
受保护的技术使用者:西安工业大学
技术研发日:2022.03.18
技术公布日:2022/9/5