工厂化循环水养殖作为一项新型高效的工厂化、集约化养殖技术,具有节水节地、健康高效、环境可控和产品质量安全等显著优势,是实现水产业转型升级和绿色发展的重要方向,也是走向渔业强国的重要途径。
国外工厂化循环水养殖起步较早,循环水养殖已成为美国、法国、挪威和丹麦等国家水产业发展的重要方向,现已基本实现了机械化、自动化、信息化和经营管理现代化。近年来,随着物联网和智能管理技术的发展,逐渐向规模化和智能化的方向发展,建立了以养殖对象为主体的经营管理数学模型和专家决策系统,初步实现了精准养殖和智能管控。
我国循环水养殖起步虽晚,但经过20多年的发展,循环水养殖技术水平已有显著提升,取得了一大批具有自主知识产权的核心技术和装备。但与国外相比,我国循环水养殖技术在智能化、系统稳定性等方面存在明显差距,进入“十三五”后,国家明确提出了水产养殖绿色发展要求,结合产业需求,依据国际工厂化循环水养殖技术发展趋势,我国工厂化循环水养殖将朝着智能精准、绿色节能和高效清洁的方向发展。
针对我国循环水养殖系统长期运行的稳定性和可靠性不足、投饲和收捕等主要作业过程对人力依赖度较高等技术难题,中国水产科学研究院渔业机械仪器研究所工厂化循环水养殖装备科技创新团队围绕循环水养殖共性关键技术精准化和智能化发展需求,瞄准水处理和生产管控两大核心环节,在水质智能调控和养殖精准管控2个方面进行了技术攻关。
(1)研发基于投饲量和PID控制器的pH自适应控制系统技术,通过主动补偿碱度解决系统封闭循环导致的水体酸化,影响水质稳定性和鱼生长的问题。
封闭循环水养殖系统中,由于鱼呼吸作用以及生物滤器硝化反应会导致水体碱度消耗,pH下降,进而导致养殖对象健康和生长受到影响。针对该问题研发pH自适应控制系统技术,主要原理为根据投饲量和碱度消耗模型,定时定量向水体中添加碱液,同时使用传感器和模糊PID控制器对pH进行实时监测和反馈调节,实现精准控制的目的。第三方性能检测结果显示,设备在淡水工况下控制精度误差为-0.04,海水工况下为+0.02(表1)。同时,在养殖公司黄条鰤循环水养殖系统中进行了为期1个月的集成示范,应用结果表明,pH控制精度误差在±0.07范围内。
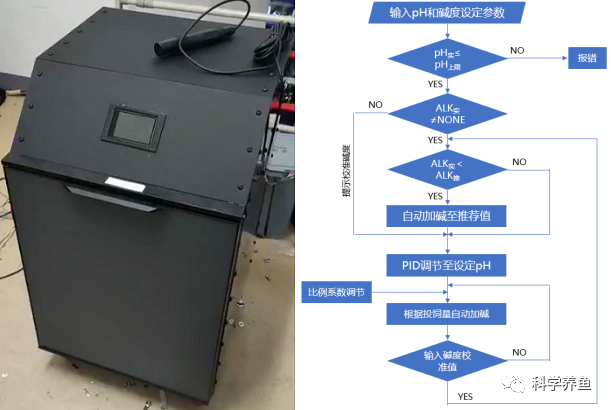
图1 基于投饲量和PID控制器的pH自适应控制系统及控制逻辑原理图
表1 反馈型pH控制系统性能第三方委托检测结果

(2)攻克了循环水养殖系统中鱼溶氧精准调控难题,研发了基于GRU预测模型的溶氧智能控制技术与装备。
现有养殖池溶氧调控主要采用人工控制阀门大小调节氧气输入量,由于养殖水体中耗氧因素较多,人工手动调控无法保证调节的及时性和准确度,容易导致养殖池溶氧过饱和造成氧气浪费或溶氧过低影响养殖对象健康等问题。针对该问题,研发基于GRU预测模型的溶氧智能控制技术。主要技术原理为,采用GRU机器学习算法构建鱼耗氧率预测模型,根据鱼体规格、水温、溶氧浓度对鱼群耗氧率进行实时预测,进一步计算并控制氧气添加量。当溶氧实测值与目标设定值出现偏差时,则调用反馈校正和迁移学习对预测模型进行修正。研制装备1套(图2),主要由Arduino UNO主板、数控恒压电源、直流固态继电器、电磁阀、OLED液晶屏幕、开关电源、旋转编码器模块、比例阀、荧光溶氧传感器等部分组成。第三方性能检测结果证明,设备对溶氧的控制精度误差在±0.23mg/L范围内。同时,在养殖公司黄条鰤循环水养殖系统中进行了为期1个月的集成示范,应用结果表明,溶氧控制精度误差在±0.54mg/L范围内,较人工控制节约用氧量50%以上。

图2基于GRU预测模型的溶解氧智能控制装备
(3)突破鱼池池底自动清污技术难题,研制水下清污机器人,显著提升作业效率。
针对目前循环水养殖系统在运行过程中养殖池无法实现实时清污的问题,研发了水下自动除污技术。主要技术原理为,采用以太网上位机通信的方式控制履带式移动底盘及其搭载的转盘式清刷机构,使得清污机器人可通过远程遥控实现水下行走,并对池底固形颗粒物进行清刷,通过水流作用将污物排出养殖池。研制装备1套(图3),主要由履带式驱动底盘、控制器、清污刷盘及其驱动等部分组成。在养殖公司黄条鰤循环水养殖系统中进行了为期1个月的集成示范,应用结果表明,该装备的清污能力良好,具备良好的密封防腐性能,水下作业时具备较高的稳定性,能够有效减轻人工清刷除污作业强度,水下除污机器人的清污速度约为2min/m2,相对于人工清扫作业,其效率约提升40%。

图3 水下清污机器人
(4)攻克流化床老化生物膜影响微生物与营养盐的传质效率及滤料流失等技术难题,研发了基于超声波技术的滤料自清洗技术,研制自清洗生物流化床装备。
针对滤料比表面积小、功能性细菌占比较少的问题,开展滤料强化技术研究。研发自清洗流化床生物滤器技术和装备,使用粒径0.2mm玻璃微珠生物滤料,通过均匀上升水流实现滤料床层流化,保证营养盐和生物膜之间的高效传质,比表面积相比多孔悬浮填料提高10倍以上。同时,在反应器内部集成超声波传感器和自动虹吸装置(图4),实现滤料的自动清洗。第三方性能检测结果证明,装备对氨氮的去除负荷达到610.56 g·m-3·d-1,床层膨胀控制精度为±4.5%以内。同时,在渔机所如东渔业装备与工程中试基地河鲀循环水养殖系统中进行了为期3个月的集成示范,应用结果表明,自清洗生物流化床对氨氮的最高去除负荷达到762.5 g·m-3·d-1。

图4 自清洗流化床生物滤器
(5)创新研发了拉簧式自动围赶集鱼装备,满足活鱼泵吸需要,显著降低人工作业工作量。
针对目前国内活鱼围赶作业机械化水平低,人工作业容易对鱼造成应激,起捕效率不高等问题,研发了一种拉簧式自动围赶集鱼装备(图5)。主要技术原理为由单轮驱动滑车沿池口移动,牵引绳网绕养殖池一周,利用弹簧预紧力收紧绳网,实现活鱼围赶的目的。整套设备采用快速夹装方式,拆装简便,易学易用。第三方检测表明,牵引滑车移动速度为2.5cm/s,装备驱动功率为25W,一次集鱼率达到98.2%。经生产示范对比效果显示,较人工作业方式,效率提升38%。

图5 弹簧收缩式集鱼装备
(6)根据康达效应产生的流体附壁作用,研发一种管道式自动提鱼装备,解决现有真空泵吸技术间歇工作、设备体积庞大且较笨重的问题,提升工厂化养殖机械化水平。
现有活鱼自动泵吸技术主要有真空式和离心式吸鱼泵2种形式,存在设备体积庞大、连续工作能力不足等问题,无法较好地满足在工厂化车间狭小空间内的使用需要。针对该问题,创新设计一种环形喷射式吸鱼口,利用康达效应产生的流体附壁作用,实现水流量扩增的效果,通过高速抽吸水流来实现活鱼自动吸捕的需要。采用SolidWorks FloXpress软件仿真优化了吸鱼口通径、收缩角、喷口缝隙宽度、进水流量等参数,结果表明经过环形吸鱼口,水流量扩增效果可达1.9倍,吸口处水流速度可达3.6m/s。第三方性能检测结果显示,吸鱼能力可达15.9 kg/min。

图6 管道式自动提鱼装备