每个少年都会有这样一个武侠梦——手持青锋,头戴斗笠,飞檐走壁,行侠仗义!而我们的现实生活中,还真有这么一位“大侠”,轻功过人,分分钟就能实现“上墙自由”。
它就是我们今天的主角——壁虎。
01
壁虎漫步有妙招
竖直面、天花板、岩石缝隙中,大壁虎(Gekko gecko)都能运动自如,真可以说是全空间运动的小能手。这主要因为大壁虎的脚掌具有黏附能力,大壁虎是一类体重相对较大的大体型黏附动物。

大壁虎在养殖环境中的照片
科学家对其黏附机理的研究已经较为成熟,壁虎的运动黏附器官是一种典型的多层级、分布式系统——每个脚掌上有五个独立分布的脚趾,每个脚趾上分布着 10-15 个弧形皮瓣,皮瓣上覆盖着数百万根微纳米尺度的刚毛。脚掌的黏附力主要源于其底部微小刚毛与基底表面所产生的分子间作用力,这些刚毛直径大约 5μm,仅为人类头发直径的五十分之一,还真是连一根头发丝儿都不如!这种黏附力的产生依赖于多层级的黏附系统(包括脚掌-脚趾-皮瓣-刚毛)以及对这种黏附系统高效且精细的调控。
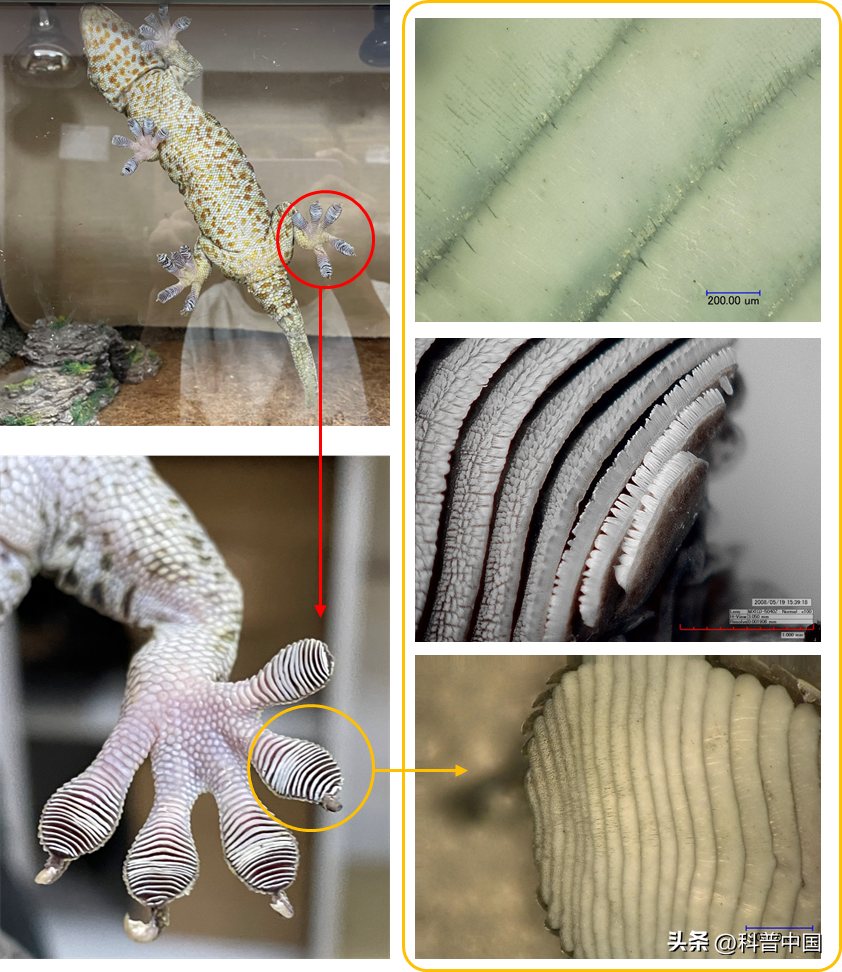
壁虎的多层级黏附器官
02
看壁虎如何实现“粘贴”自由
大壁虎是各种黏附物种中体重最大的,其对黏附能力的掌控不仅得益于分层级的黏附结构,还依赖于对黏附结构的高效精细调控。脚掌是大壁虎的黏附器官,具有刚柔耦合的结构特性。对脚掌黏-脱附周期中运动行为的研究是了解黏附运动广泛适应性的基础。脚掌的黏-脱附运动周期分为支撑和摆动相位,其中支撑阶段主要分为接触、黏附和释放三个阶段。
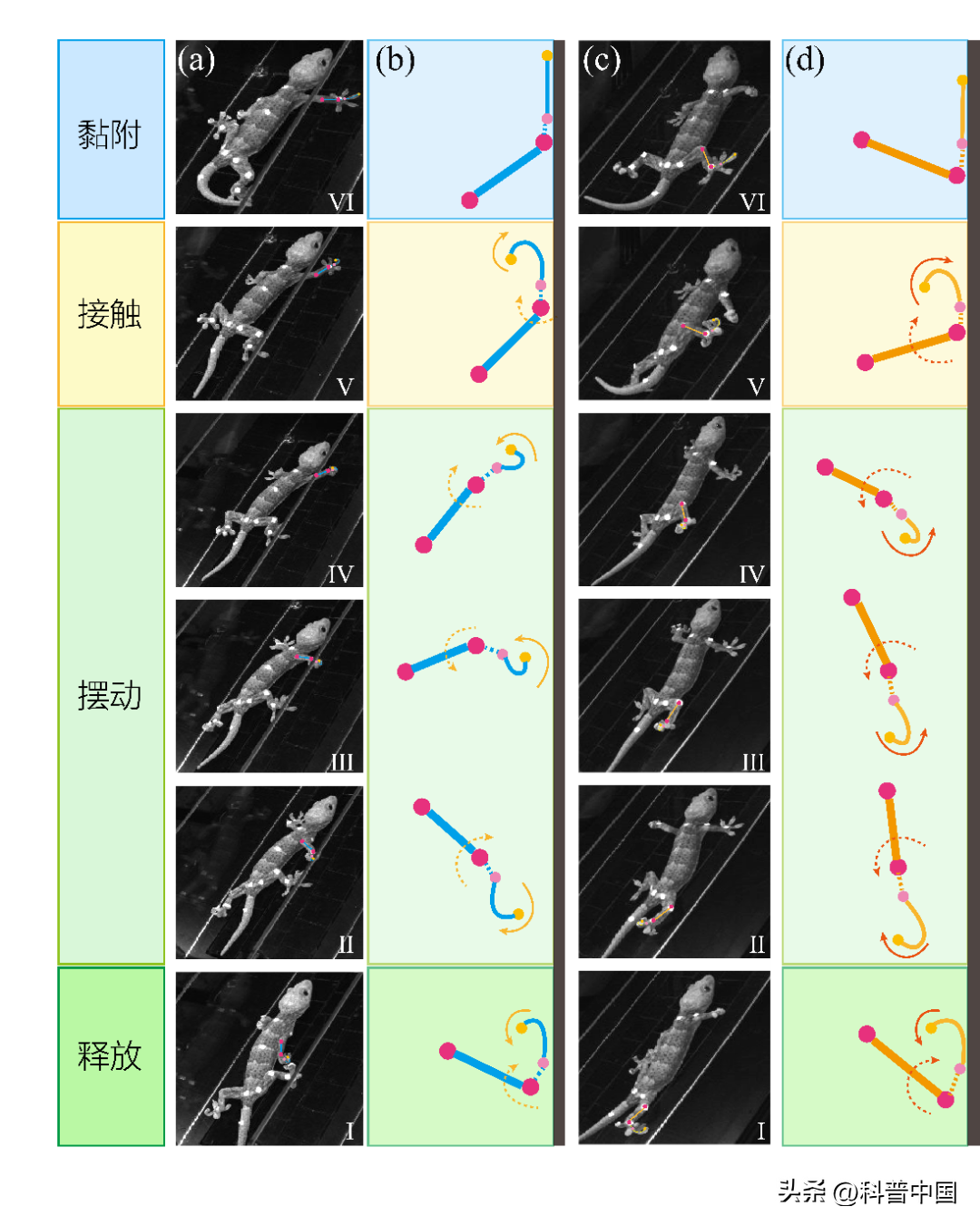
壁虎前后脚掌黏-脱附运动过程的不同阶段
已有研究表明大壁虎脚掌在黏附阶段时的运动姿态和布局与黏附力有关(方向和大小),比如大壁虎通过改变五个脚趾的布局来面对不同斜角的斜面以及重力加载方向,并通过改变支撑阶段时脚趾的支撑姿态来应对不同形状的基底。此外,壁虎可以通过调整运动步态来适应不同环境的运动需求,比如在竖直面不同方向运动时脚掌黏附时间发生调整,在不同斜角基底上运动速度明显改变,然而研究发现单个脚趾完成黏附的时间保持不变。
03
对着壁虎脚丫子偷拍的科学家
黏附运动中有关脚掌运动行为调控的研究还不够完善,在黏-脱附运动的不同阶段,脚掌的动作行为分别是怎样的?各阶段的动作行为会不会影响到脚掌黏附的效果?这些问题还不明确。
为了对脚掌黏-脱附周期中的运动行为进行系统化的研究,了解在不同运动环境下大壁虎脚掌的黏-脱附行为模式采取怎样的适应性调控策略,科研人员对大壁虎在不同倾斜表面(水平面、45° 斜面和竖直面)和不同运动方向(向上和向下)上的黏-脱附运动行为进行了研究。可以说是“怼脚直拍”了。

研究人员在实验室内对大壁虎做实验
研究中搭建了一套针对具有大柔性器官小动物运动行为精准测量的运动捕捉系统,对大壁虎在攀爬运动过程中躯干-肢体-脚掌等器官上的标记点进行精确捕捉。
由此,对大壁虎的运动行为进行记录和量化处理,定义了一系列运动参量对脚掌运动进行定量表征,分析并总结前后脚掌的黏-脱附运动的行为模式,比较前后脚掌黏-脱附运动模式的差异性和相似性,总结脚掌与肢体运动的协作关系。
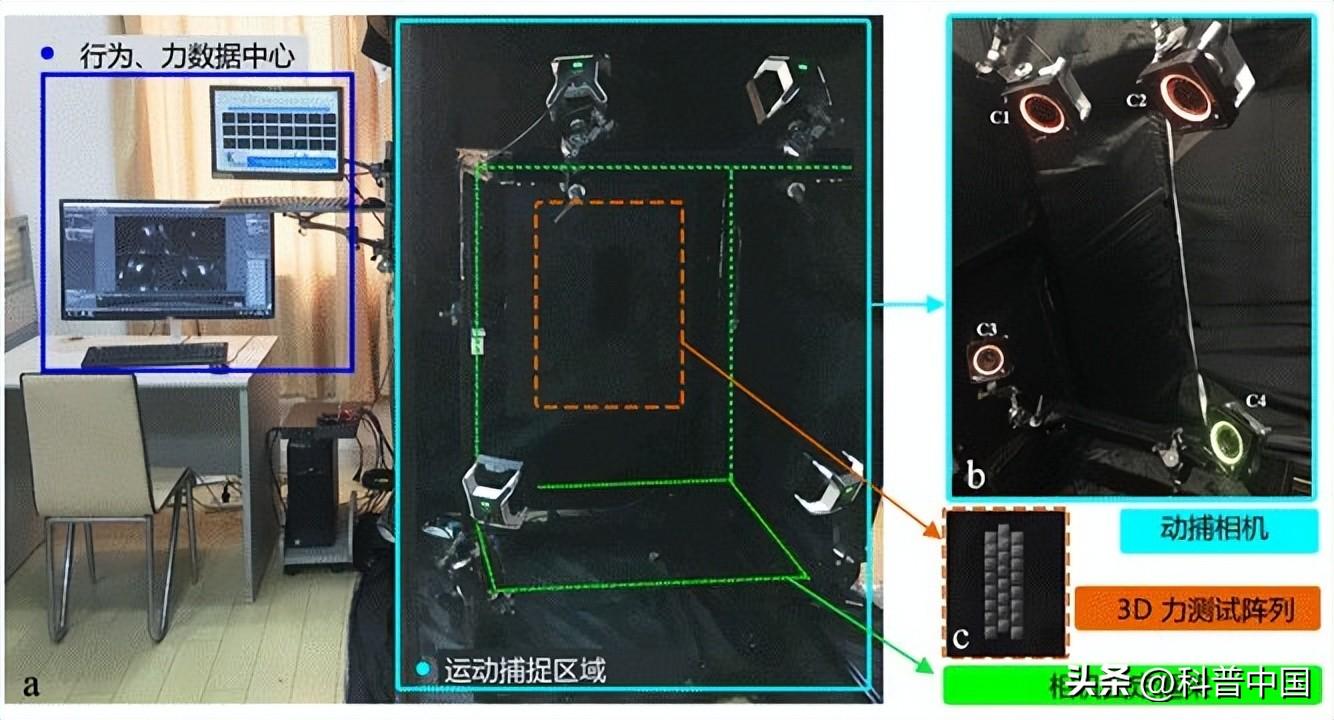
南京航空航天大学仿生所搭建的运动行为-反力同步精准测试系统
04
跟着我前脚、后脚一个慢动作
大壁虎前后脚掌的黏-脱附运动周期在不同环境下保持惊人的相似性,比如:在接触阶段的接触时间百分比(前脚:7.42%;后脚7.44%)和弯曲角度(前脚 41°;后脚 51°)、前脚掌的运动范围(偏航 163°;俯仰 309°)及后脚掌的俯仰范围(164°)。
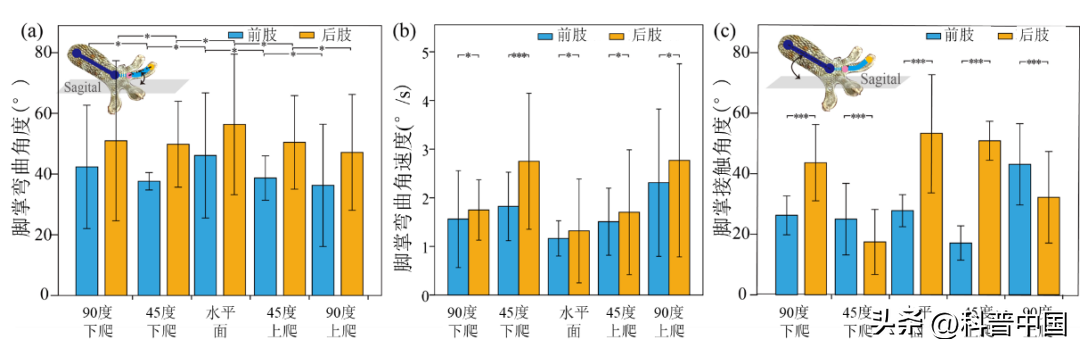
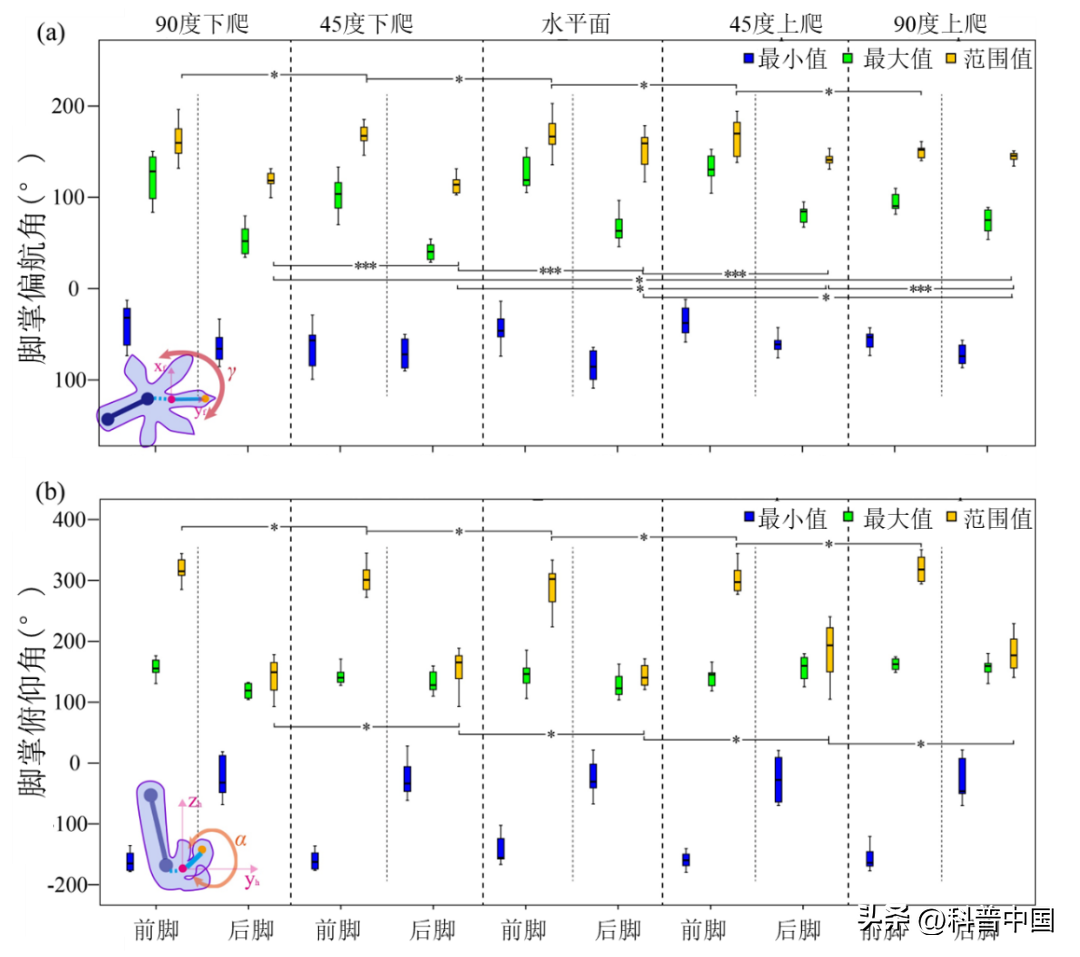
大壁虎在不同倾斜度基底上下攀爬运动中前后脚掌的运动角度
此外,黏附脚掌的运动姿态保持不变,主要表现为:前后脚掌运动角度(包括偏航和俯仰角)在单个黏-脱附周期中的变化趋势保持一致,前后脚掌偏航角都具有先减小后增大的趋势。
此外,前脚掌和后脚掌的运动姿态具有明显差异:前脚掌俯仰角的变化趋势与后脚掌相反,前脚掌俯仰角先减小后增大,而后脚先增大后减小;且前脚掌的运动角度范围相比后脚掌更大,这种差异性这主要是由于前脚和后脚具有不同的解剖结构和功能需求。
研究结果展现了壁虎前后黏附脚掌在黏-脱附周期中的运动行为具有一致性,这体现出脚掌黏-脱附运动周期中存在的节律性,这种运动规律减少了黏附脚掌在应对不同环境时运动调控的复杂性。
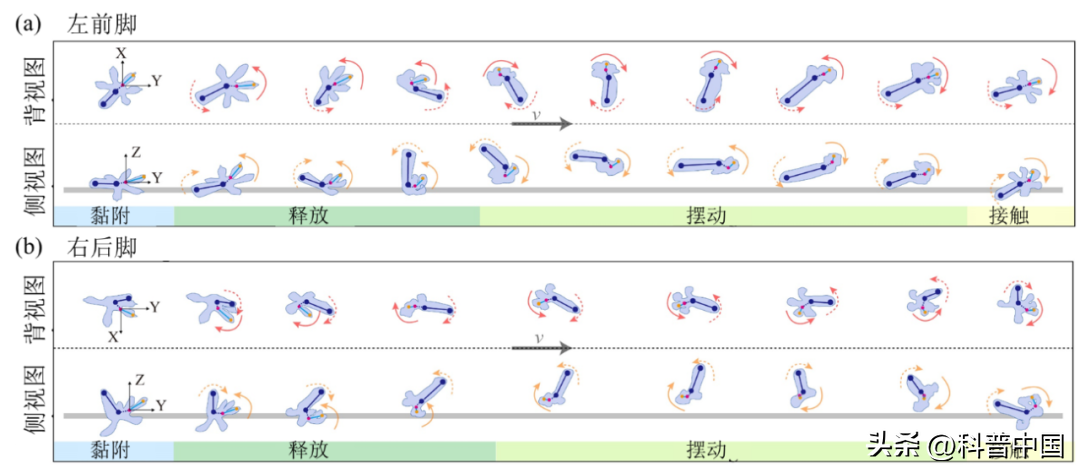
大壁虎在前后脚掌在黏-脱附运动周期不同阶段的姿态展示
大壁虎的柔性黏附脚掌在不同环境下的黏-脱附运动周期具有相同的规律,包括脚掌在空中的摆动姿态以及在接触基底时候的弯曲程度等,这主要是因为脚掌具有刚柔耦合的结构特性和特定的黏附功能需求。那么面对环境的变化,大壁虎可通过调节具有多自由度的肢体的运动,配合脚掌的黏-脱附运动,实现在各种环境下快速、稳定的攀爬运动,成为飞檐走壁的高手。
“大侠壁虎”启发我们,对于具有大柔性脚掌结构和高自由度肢体的仿生黏附机器人,脚掌的运动控制往往具有通用性,肢体则要根据环境的变化进行适应性调节。同样地,我们是否还能从其他的神奇动物身上得到启发,设计有趣又有用的发明呢?这可能就是科学的迷人之处。
文内所有图片均来自南京航空航天大学机电学院仿生所运动力学组
参考文献:
[1] Zong, W., Wang, Z., Wang, B., et al. Behaviours in Attachment-Detachment Cycles of Geckos in Response to Inclines and Locomotion Orientations. Asian Herpetological Research, 2022, 13(2): 125-136.
[2] Zong W, Wang Z, Xing Q, et al. The method of multi-camera layout in motion capture system for diverse small animals. Applied Sciences, 2018, 8(9): 1562.
[3] Wang Z, Zong W, Wang B, et al. The Marking Technology in Motion Capture for the Complex Locomotor Behavior of Flexible Small Animals (Gekko gecko). Asian Herpetological Research, 2019, 10(3): 197-210D.
[4] Song, Y., Dai, Z., Wang, Z., et al. Role of multiple, adjustable toes in distributed control shown by sideways wall-running in geckos. Proceedings of the Royal Society B, 2020, 287(1926): 20200123.
[5] 王周义, 顾文华, 吴强, 等. 墙面及天花板上大壁虎脚趾作用力测试和脚掌形态研究. 中国科学: 技术科学, 2011, 41(9): 1161-1166.
[6] Wang, Z. Y., Wang, J. T., Aihong, J. I., et al. Behavior and dynamics of gecko’s locomotion: The effects of moving directions on a vertical surface. Chinese Science Bulletin, 2011, 56(6): 573-583.
[7] Wang, Z., Xing, Q., Wang, W., et al. Contribution of friction and adhesion to the reliable attachment of a gecko to smooth inclines. Friction, 2018, 6(4): 407-419.
[8] Autumn K, Peattie A M. Mechanisms of adhesion in geckos. Integrative and comparative biology, 2002, 42(6): 1081-1090.
出品|科普中国
作者|宗卫佳、王周义 南京航空航天大学
审核|赵鹤凌《亚洲两栖爬行动物研究》编审
策划|毛萍 中国科学院成都生物研究所 馆员
监制|中国科普博览
选送单位:中国科学院计算机信息网络中心